It is often useful to either low-pass filter (smooth) time series in order to reveal low-frequency features and trends, or to high-pass filter (detrend) time series in order to isolate high frequency transients (e.g. storms).
Some of the most commonly used filters are:
 |
(9.1) |
For example, the three month running mean filter MA(3) is useful for crudely filtering out intraseasonal oscillations. Note, however, that the sharp edges in the weights of this filter can causing spurious ringing (oscillation) and leakage into the smoothed output.
These smoother low-pass filters are obtained by repeatedly
applying the MA(2) filter that has weights ![]() .
For example, with
.
For example, with ![]() applications the binomial filter
weights are given by
applications the binomial filter
weights are given by
![]() which
tail off smoothly towards zero near the edges.
After many applications, the weights become
Gaussian and the filtering approximates Gaussian kernel smoothing.
which
tail off smoothly towards zero near the edges.
After many applications, the weights become
Gaussian and the filtering approximates Gaussian kernel smoothing.
This simple and widely used recursive filter is obtained
by iterating
| (9.2) |
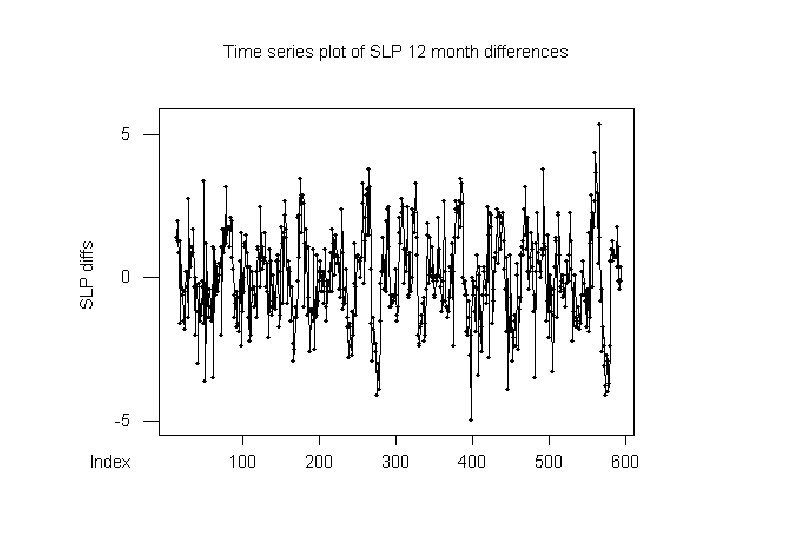
High-pass filtering can most easily be performed by subtracting
a suitably low-pass filtered series from the original series.
The detrended residuals ![]() contain the high-pass component
of
contain the high-pass component
of ![]() .
For example, the backward difference
detrending filter
.
For example, the backward difference
detrending filter
![]() is simply
twice the residual obtained by removing a MA(2) low-pass
filtered trend from a time series.
It is very efficient at removing stochastic trends and is
often used to detrend non-stationary time series (e.g. random
walks in commodity prices).
is simply
twice the residual obtained by removing a MA(2) low-pass
filtered trend from a time series.
It is very efficient at removing stochastic trends and is
often used to detrend non-stationary time series (e.g. random
walks in commodity prices).
 |